|
Xiaozhen Zhang Xiaozhen Zhang is currently a Postdoctoral Fellow in the Department of Aeronautical and Aviation Engineering at The Hong Kong Polytechnic University, where he works under the supervision of Prof. Hailong Huang. He earned his Ph.D. degree in 2025 from Beijing Institute of Technology, advised by Prof. Qingkai Yang. During February to August 2025, he was a Visiting Ph.D. Scholar at Nanyang Technological University, Singapore, working with Prof. Lihua Xie. He previously received his M.S. degree in 2021 and B.E. degree in 2018 from Northwestern Polytechnical University, under the supervision of Prof. Panfeng Huang. His research interests include robotics and autonomous systems, multi-agent systems, swarm intelligence, distributed control and optimization, and learning-enabled autonomy. Dr Zhang is dedicated to
exploring the coordination and autonomy of multi-robot
systems, with the ultimate vision of enabling robot
swarms to achieve autonomous, intelligent, and
human-compatible collective behavior in complex
environments. To pursue this vision, I integrate
distributed control, optimization, estimation, and
learning-enabled AI techniques to bridge the gap between
individual intelligence and collective autonomy. |
 |
Publications
 |
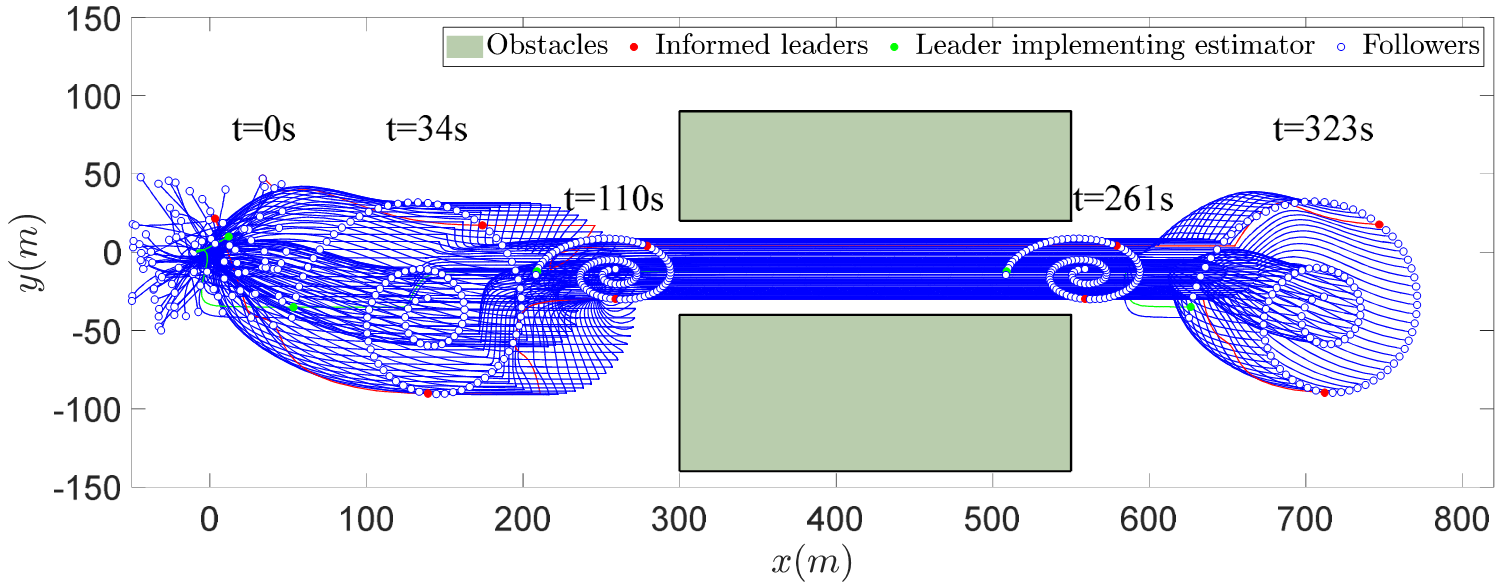
[7] Cooperative
Shape-Translation Estimation and Control for
Time-Varying Linear Formation This work develops a shape-translation estimation and control framework that enables multi-agent systems to track time-varying linear formations. |
|
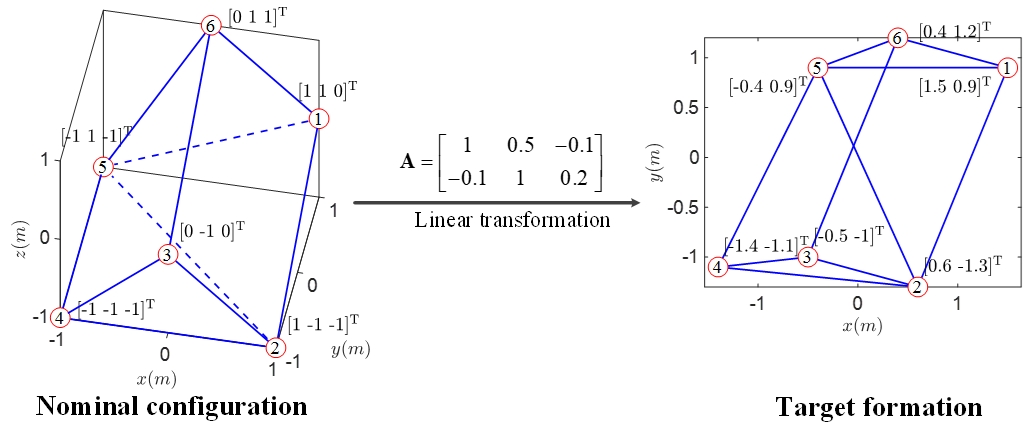 |
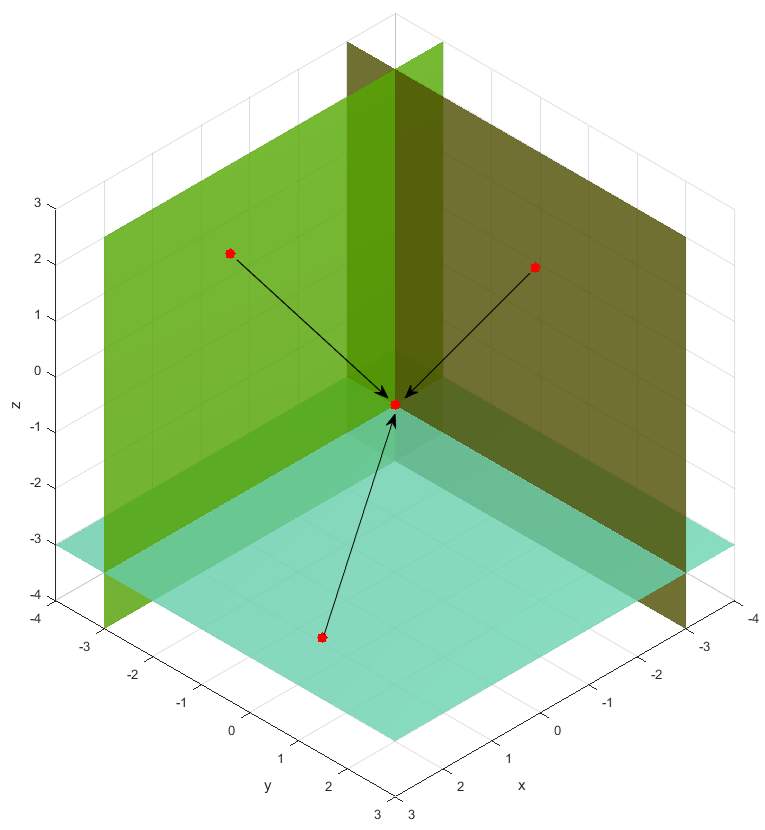
[6] Linear Formation Control
of Multi-Agent Systems This work proposes linear formation control to enable multi-agent systems to achieve formations generated by linear transformations. It extends affine formation control to high-dimensional nominal configurations. |
|
 |
[5] Joint Estimation and
Planar Affine Formation Control with Displacement
Measurements This work proposes a displacement-based distributed estimator for identifying the time-varying affine formation shape matrix. |
|
|
[4] Distributed Variation
Parameter Design for Dynamic Formation Maneuvers With
Bearing Constraints This work develops a distributed method for adjusting the scale parameters of bearing-constrained dynamic formations, allowing the formation scale to adapt online to environmental changes. |
|
| |
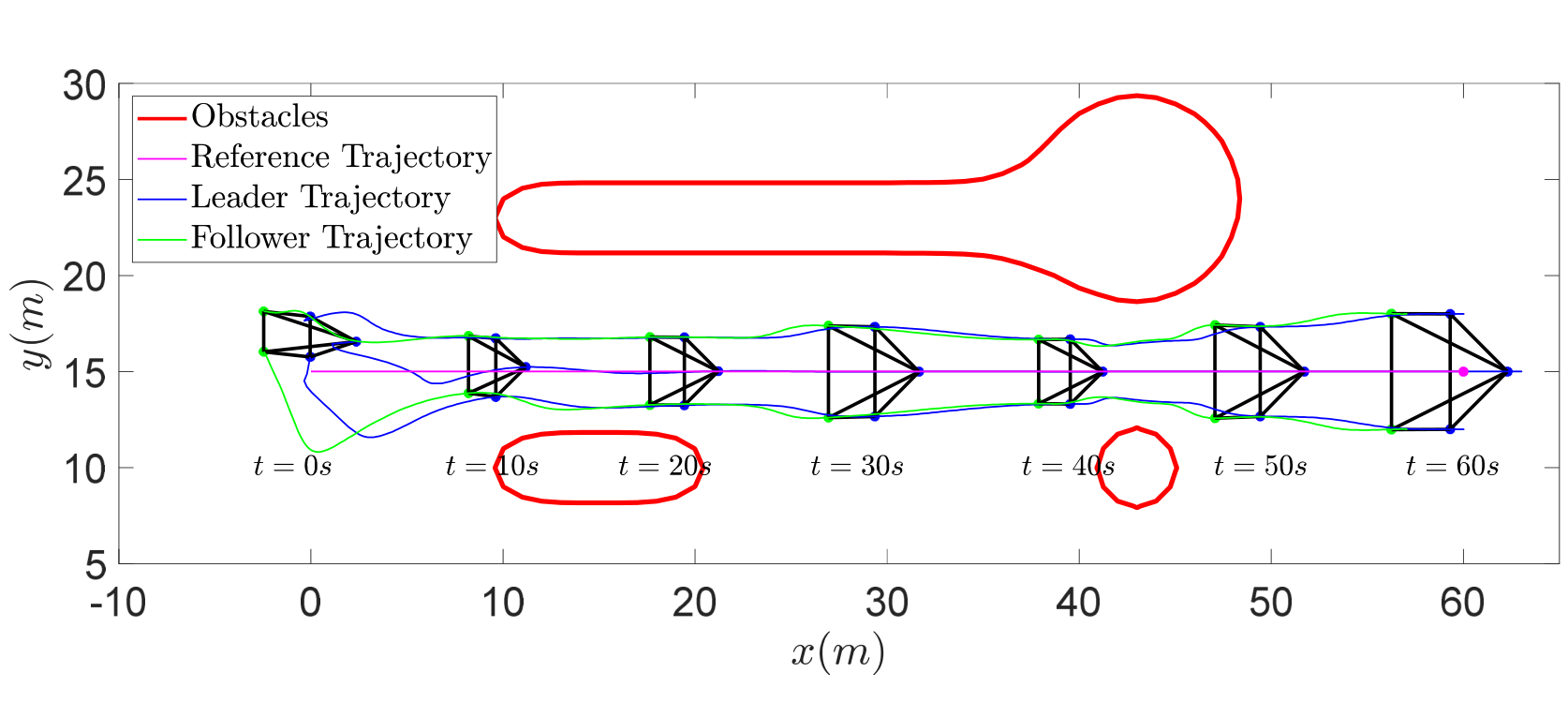
[3] Formation Planning for
Tethered Multirotor UAV Cooperative Transportation With
Unknown Payload and Cable Length This work addresses formation planning for tethered multirotor cooperative transportation with uncertain payload and cable length, enabling online adjustment of cable tension distribution for load balancing. |
|
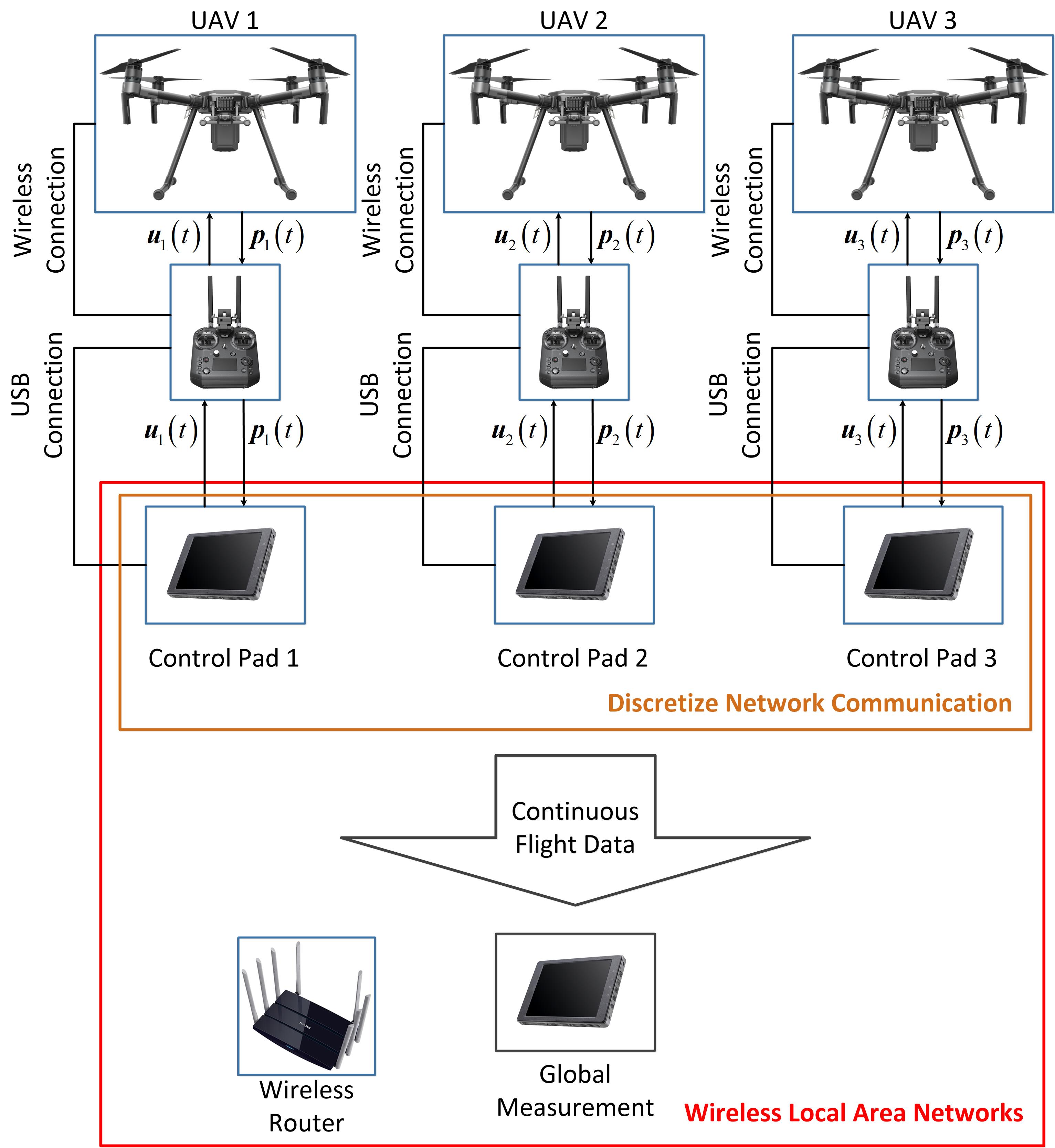 |
[2] Self-Triggered Based
Coordinate Control With Low Communication for Tethered
Multi-UAV Collaborative Transportation This work develops a self-triggered cooperative path-following controller for tethered multi-UAV transportation with reduced communication. |
|
|
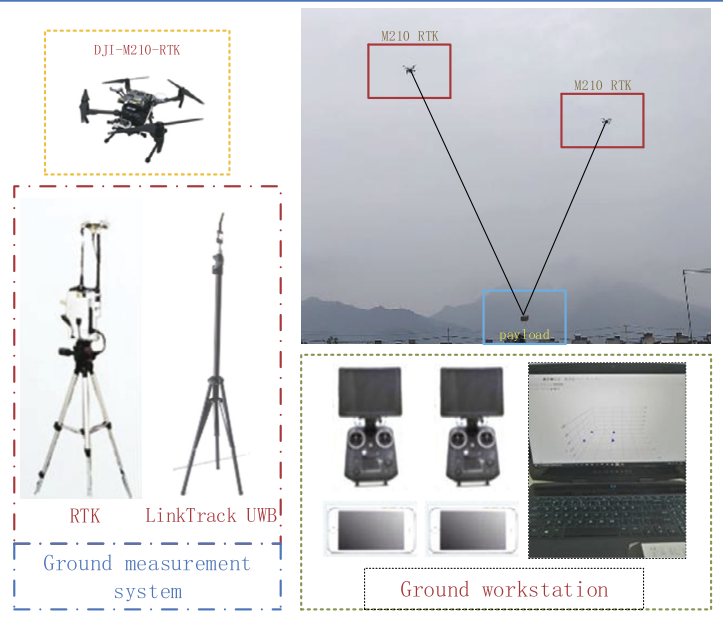
[1] Analysis, planning and
control for cooperative transportation of tethered
multi-rotor UAVs This work develops an integrated analysis, planning, and control framework for tethered multi-rotor cooperative transportation. |
Conference
 |
[5] How Do Robot Swarms
Behave Compliantly? This work introduces compliance to robot swarms and studies flexible collective responses to external interactions. |
|
[4] A Distributed Algorithm
for Solving A Time-Varying Linear Equation This work proposes a distributed algorithm for solving time-varying linear equations over multi-agent networks without centralized information. |
|
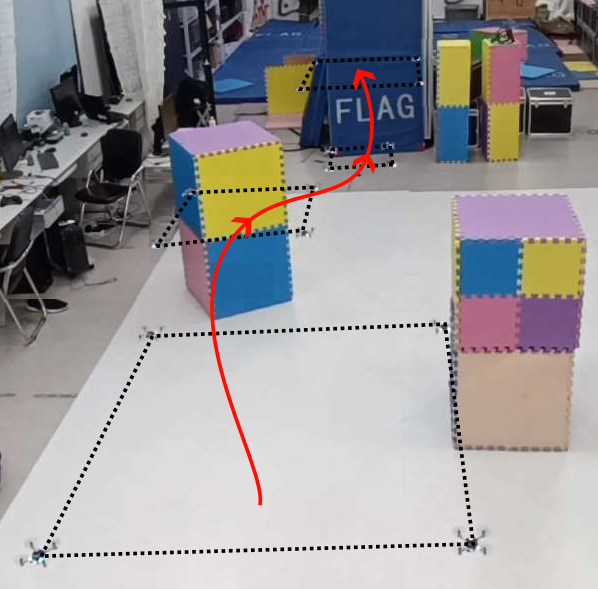
[3] Distributed Decision
Making on Scaling Size for Obstacle Avoidance in Affine
Formation Control |
|
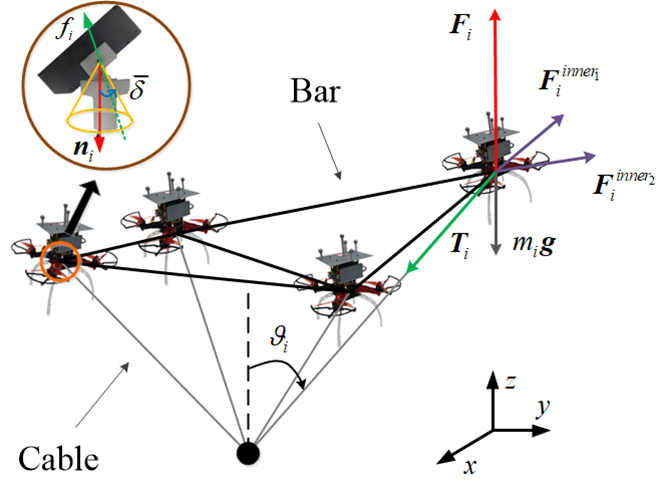
[2] Design and Analysis of
Truss Aerial Transportation System (TATS): The
Lightweight Bar Spherical Joint Mechanism This work proposes the Truss Aerial Transportation System, a lightweight cooperative transportation architecture based on bar-spherical joint mechanisms. |
|
|
[1] Distributed Control for
Cooperative Transportation in Presence of Unknown
Disturbance |
Talks
|
Academic Service
Conference Reviewer:
IROS2019, IROS2021, IROS2022, ACC2022, CDC2023,
ICIT2024, ICLR2025, ACC2026, ECC2026, CDC2026.
Journal Reviewer:
Conference Reviewer: IROS2019, IROS2021, IROS2022, ACC2022, CDC2023, ICIT2024, ICLR2025, ACC2026, ECC2026, CDC2026. Journal Reviewer:
|
| Last Update 29 April 2026. |